Finálne video je na svete!
08.05.2020
Ahojte, tak konečne sme sa dočkali. Naša snaha sa vyplatila.


Ahojte, tak konečne sme sa dočkali. Naša snaha sa vyplatila.

A je tu záver našej dlhodobej práce. Dostali sme sa k návodu č. 10. Po náročnej príprave tu máme robota schopného pohybovať sa po čiare, ktorého si dokážeme ľahko namodelovať s postupnosťou krokov v prostredí Stateflow.

Dnes sme sa dostali k návodu č. 9. Aby sme moli reagovať na kombináciu všetkých výstupov zo snímačov, musíme využiť PID regulátor. PID regulátor (proporcionálny, integračný a derivačný regulátor) je princíp, ktorý využíva spätnú väzbu na riadenie rôznych systémov. Na základe regulačnej odchýlky sa vypočíta korekcia (výstup z regulátora).

Naša snaha priniesla konečne ovocie. V predošlých návodoch sme vytvárali bloky/subsystémy, ktoré teraz využijeme v návode č. 8 pri sledovaní čiary. Princíp je jednoduchý. Jednou z možností sledovania čiary je sledovanie pomocou binárnych výstupov zo snímača. Budeme teda pracovať s informáciami, či je pod snímačom čiara (logická informácia = 1)...

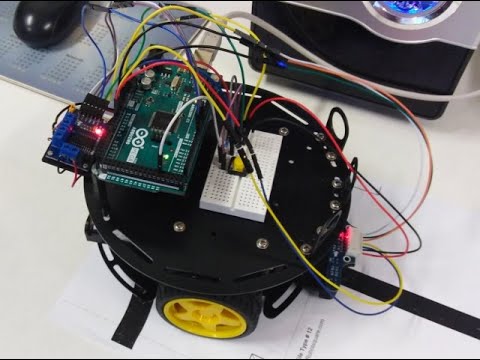
Na telo robota sme pridali infračervený snímač. Bude snímať čiernu čiaru dráhy, ktorú sme si prichystali. Princíp je jednoduchý - infračervený snímač deteguje čiernu farbu. Pomocou infračervených diód na snímači sa vysiela svetlo, ktoré sa od dráhy odráža späť na prijímač. Je to fotodióda, ktorá deteguje svetlo špecifickej dĺžky. Podľa množstva...

Vďaka programovaniu v MATLABe a Simulinku sme rozblikali LED diódy a začali sme stavať hlavnú konštrukciu robota.
Všetky videá nájdete na: https://www.youtube.com/channel/UCrVbUCq9VmvoWh2CJMw19EQ
